- 企業推廣分銷B2B平臺
- 累計為企業宣傳展示1.2億次以上
- 分銷模式,讓每個人都愿意幫您做生意
- 30多萬銷售員注冊,快速對接銷售渠道
機械手爪大多是僵硬的機械臂,今天給大家介紹的是一種軟體機器人。顛覆式的設計,讓人耳目一新。
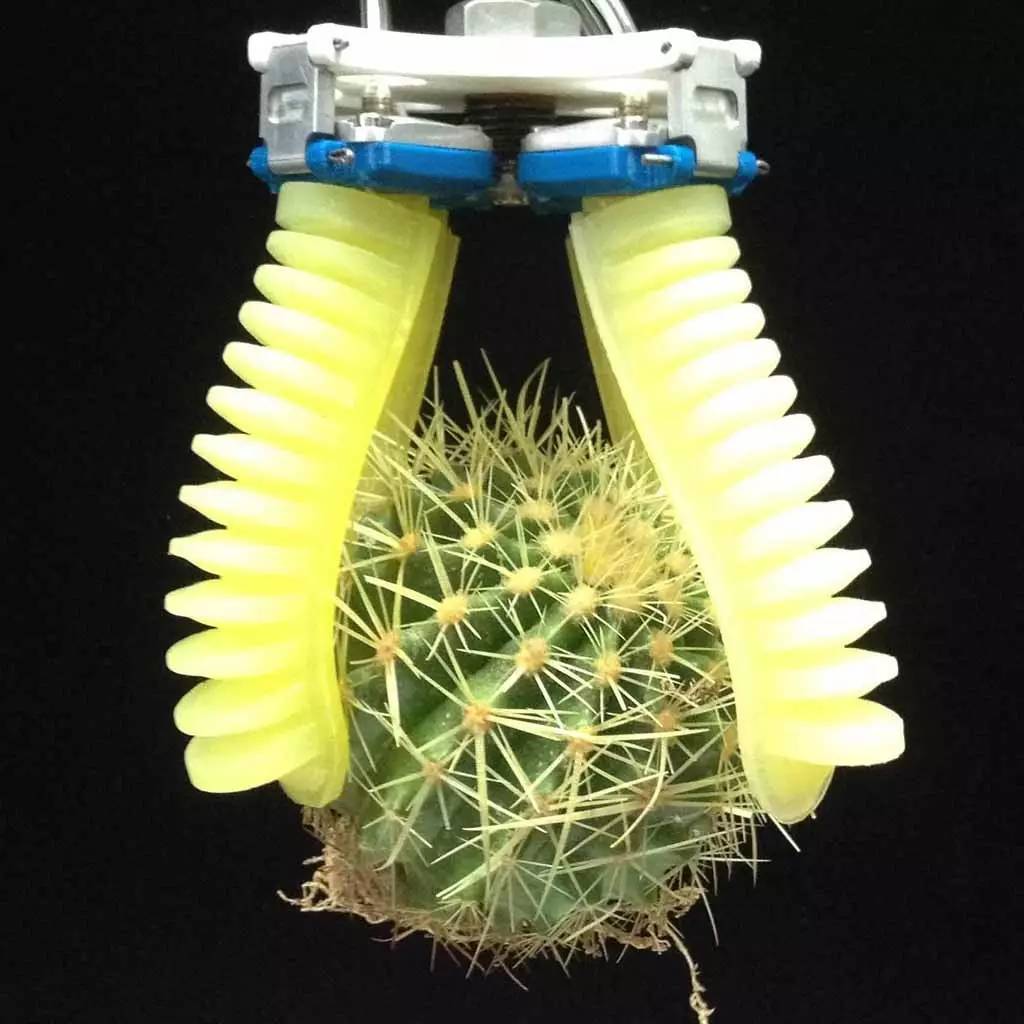
由于傳統的抓取裝置如機械手爪、吸盤等存在設計周期較長,更新頻率較高,利潤附加值較低,難以抓取易損壞、易變形物體等問題,近年來,學術界出現了“軟體手”的概念,將機械手由傳統的氣缸等剛性體變換成柔性的有機聚合物,以克服現有傳統機械手在特定應用場景的缺點。
無獨有偶,近年來學術界還出現了一種顛覆式的機器人——軟體機器人。現有的軟體機器人在材料選取上與軟體手類似,同樣擁有很大的柔性,并擅長在特定的場景中應用。
不同的是,軟體手只是將末端執行器設計為柔性,其機械臂和運動關節與傳統的機器人沒有區別;而軟體機器人的機械臂也是柔性的,甚至其運動關節與傳統的機器人相比也發生了改變,甚至有的軟體機器人的運動副數量可以理解為無窮多。
有趣的是,雖然軟體手和軟體機器人并不完全相同,但是二者的發展歷史卻是相互交織的。2011年,哈佛大學Whitesides研究小組的學者Carl Vause,從章魚中獲得了靈感,發明了軟體機器人,這款軟體機器人長約18厘米,可以單“腿”離地,能在一分鐘內匍匐穿過2厘米高的間隙。
一般的剛體機器人在裝配上軟體手之后是否應該歸為軟體機器人?這一問題在學術界內還有一定的爭議。筆者認為,裝配上軟體手的剛體機器人并不是軟體機器人。
在運動學和動力學上,裝配上軟體手的剛體機器人,其運動學公式、雅可比矩陣、海塞矩陣等基礎公式并沒有改變,機器人在運動學上的運動末端的位姿、速度等仍然是可預測和可控的,只是機器人的末端執行器有一點“古怪”而已,而末端執行器的種類對機器人運動學和動力學的性能沒有任何影響。
而軟體機器人的機械臂是柔性的,其運動學和動力學性能并不能通過傳統的公式求解出來,機器人的運動學和動力學性能已經完全改變,機器人的運動末端位姿、速度等變得不可預測。